Chap. 16 상보필터
상보필터는 칼만 필터보다 훨씬 단순하고 설계하기 쉽다.
칼만필터와 달리 발산할 염려가 없다.
융합할 센서의 주파수 특성이 서로 보완적인(complementary) 특성을 갖는 경우에만 적용이 가능하다는 한계가 있다.
16.1 상보필터의 개념
여러개의 센서를 융합해서 더 나은 측정값을 얻고자함임.
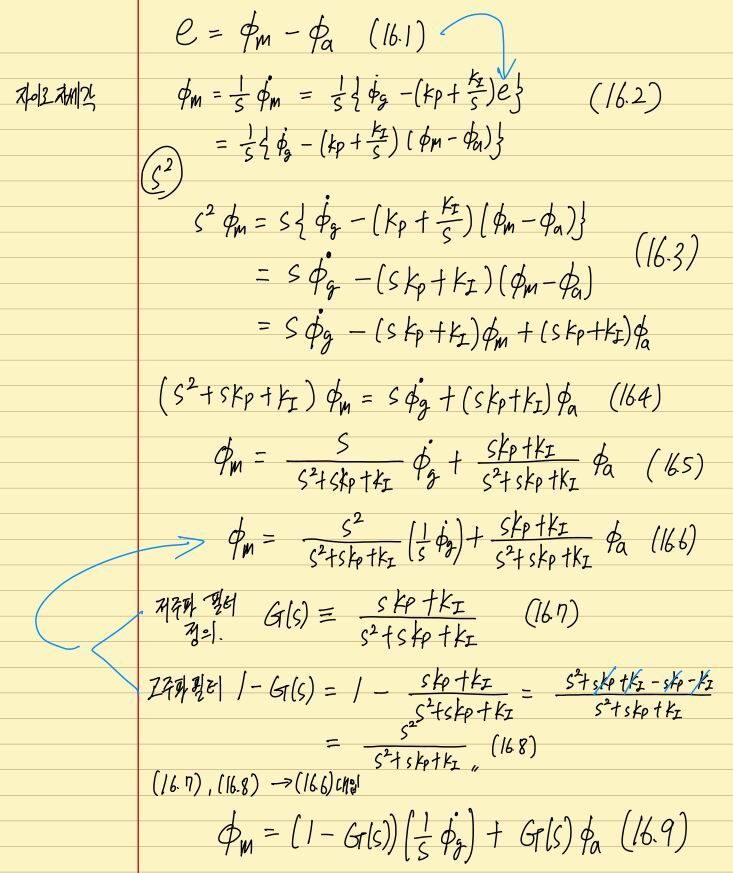
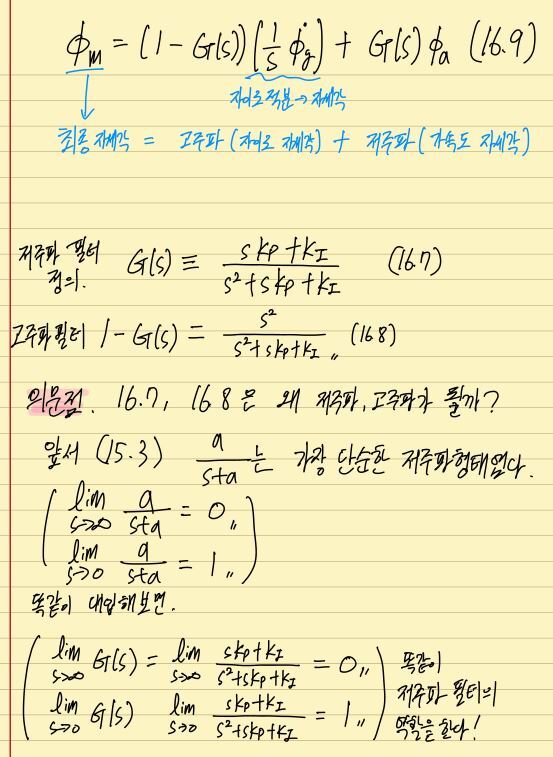
앞서 chap 15에서 "저주파+고주파 = 1" 된다는 사실을 이용하면
G(s) = 저주파 필터
1- G(s) = 고주파 필터
가 된다.
참값은 설계되는 필터에 의해 영향을 받지 않는다.
단, 상보필터에 의해 영향을 받는 신호는 각 센서의 측정 잡음 N1(S), N2(S) 뿐이다.
필터를 잘 설계해서 두 측정잡음을 없애는 필터를 설계하는 목표이다.
그런데 두 측정잡음의 특성이 하나는 저주파, 하나는 고주파 잡음일 경우
즉, 잡음이 서로 상보적일 경우 상보필터로 성능개선이 가능하다는 것이다.
물론 상보필터는 센서가 3개일 경우에도 적용은 가능하다.
\(G_1(s)\) = 측정값1 필터의 전달함수
\(G_2(s)\) = 측정값2 필터의 전달함수
\(1- G_1(s) - G_2(s)\) = 측정값3 필터의 전달함수
이런식으로 적용할 수 있다.

16.2 기울기 자세 측정
자이로, 가속도 융합상보필터
두 센서의 잡음특성이 상보적인지 부터 확인해야한다.
지금까지 설명한 상보필터의 개념은 되먹임 구조가 아니다. open-loop 방식이었다.
되먹임 형태의 알고리즘 같아보이지만, 실은 상보필터다.

앞 챕터와 마찬가지로 겉모양은 되먹임 형태이지만 결국 상보필터이다.
아래 내용은 센서의 측정값을 2번 적분해야 물리량이 나오는 시스템에 적합하다.
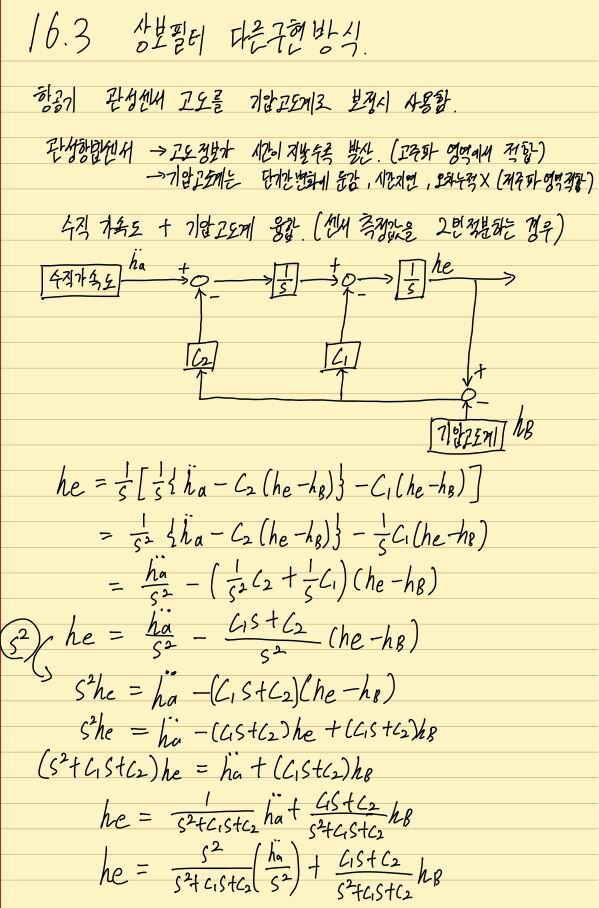
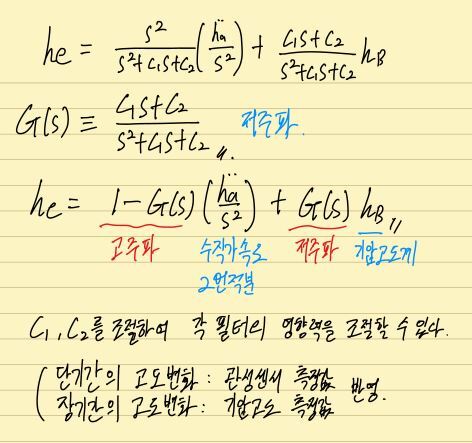
두 센서의 장점만을 살려 융합하기 때문에 성능이 개선 될 수 밖에 없다.
상보필터를 살펴보았다.
칼만필터에 비해 간단하고, 직관적이다. 또한 모델 예측이 필요없다.
반응형
'Study > 칼만필터' 카테고리의 다른 글
| [칼만필터] 부록. 베이즈 정리 (0) | 2022.01.15 |
|---|---|
| [칼만필터] Chap. 15 고주파통과필터(와 저주파필터) (0) | 2022.01.15 |
| [칼만필터] Chap 14. 파티클필터 (0) | 2022.01.15 |
| [칼만필터] Chap 13. 무향칼만필터 (0) | 2022.01.15 |
| [통계] 공분산행렬과 PCA(주성분분석) (0) | 2022.01.15 |